

Tool center point is a key part of robot programming and movement. It is the exact point on the tool where the robot performs its task, like picking up objects, welding, or painting. If the tool center point is not set correctly, the robot may not move as expected, causing errors or even damage. Imagine a robotic arm with a gripper—if the tool center point is off, it might miss the object or grab it the wrong way. That’s why defining it properly is so important. A well-set tool center point makes the robot more accurate and efficient, reducing mistakes and improving work quality. Whether in manufacturing, logistics, or automation, robots need the correct tool center point to function properly. It helps them understand where their tool is in space, allowing smooth movement and better precision.
When a robot moves, it follows instructions based on its tool center point. This helps it complete tasks without hitting objects or moving incorrectly. A wrongly defined tool center point can lead to big problems, like misplaced parts, product damage, or wasted materials. For example, in welding, if the tool center point is not right, the robot may weld in the wrong spot, leading to weak joints or faulty products. The same applies to pick-and-place robots that handle fragile items. A small mistake in the tool center point could cause breakage or misplacement. Proper calibration of the tool center point saves time, reduces errors, and ensures the robot works perfectly. In industries where precision is crucial, such as automotive or electronics, a correctly set tool center point makes a big difference in quality and efficiency.
What is Tool Center Point and How Does It Work?
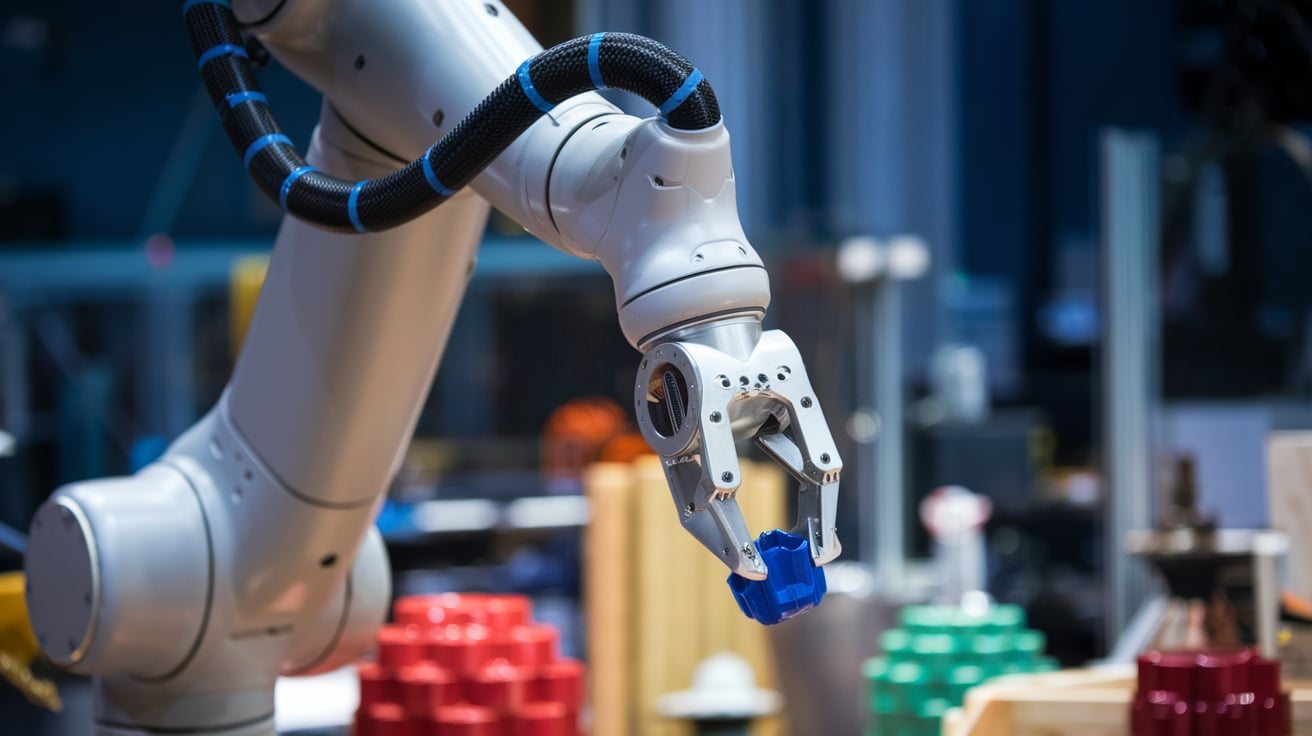
Tool center point is the exact point on a robot’s tool where actions like gripping, welding, or cutting take place. It acts as a reference that helps the robot understand where its tool is in space. Without a properly defined tool center point, a robot might move inaccurately, leading to errors in production. The tool center point is usually set based on the tool’s shape and function. For example, if a robot uses a gripper, the tool center point is placed between the gripping fingers. If it has a welding torch, the point is at the tip where the welding occurs. A well-defined tool center point ensures smooth movements, precise operations, and better efficiency in robotic automation.
Why is Tool Center Point Essential in Robotics?
A properly defined tool center point is crucial for accuracy, consistency, and efficiency in robotic operations. Robots perform tasks based on their programmed movements, and an incorrect tool center point can lead to misplaced actions. This can cause production errors, waste materials, or even damage products. For instance, in manufacturing, a pick-and-place robot must have an exact tool center point to ensure it grips objects correctly. In welding, a small misalignment of the tool center point can weaken joints and affect product quality. Proper calibration of the tool center point allows robots to move smoothly, avoid collisions, and increase productivity. It also minimizes wear and tear on robotic components, reducing maintenance costs and improving overall performance.
How to Properly Define Tool Center Point for Accuracy
Defining the tool center point correctly ensures the robot works with precision. The process starts by selecting the tool being used, such as a gripper, suction cup, or welding torch. Next, the tool center point must be positioned at the exact point where the tool interacts with objects. The best way to set it is by using multiple orientations—touching a fixed point from different angles. This method improves accuracy by eliminating measurement errors. In robotic programming, the tool center point is entered as XYZ coordinates relative to the robot’s flange. Some robots also allow for automatic calibration using sensors. A well-defined tool center point results in better cycle times, reduced defects, and improved overall efficiency in automated systems.
Common Mistakes in Setting Tool Center Point and How to Avoid Them
One common mistake in setting the tool center point is placing it incorrectly on the tool, leading to inaccurate movements. Another issue is not using enough calibration points, which results in errors when the robot operates at different angles. Some users forget to account for tool length, causing misalignment during tasks. Additionally, not using precise measurement tools can lead to small errors that affect performance over time. To avoid these mistakes, always follow a structured calibration process and verify accuracy through test runs. Using eight or more calibration points instead of the minimum three can improve precision. Regularly checking the tool center point also ensures the robot maintains its accuracy over time.
Tool Center Point vs. Robot Flange: What’s the Difference?
The robot flange is the mounting surface where tools are attached, while the tool center point is the exact point where the tool interacts with objects. The flange is a fixed part of the robot, whereas the tool center point changes depending on the tool used. For example, a welding torch’s flange is at the robot’s wrist, but its tool center point is at the torch tip. If the tool center point is not set properly, the robot may move as if the tool were shorter or longer than it actually is. Understanding this difference helps in precise programming, reducing positioning errors, and ensuring smooth robotic movements.
Step-by-Step Guide to Calibrating Tool Center Point in Robots
- Attach the tool securely to the robot flange.
- Open the robot’s control software and select the tool center point calibration option.
- Choose the calibration method: single-point method (touching a point at different angles) or multi-point method (touching a plane).
- Move the robot so the tool touches a fixed point in different orientations.
- Record the robot’s joint values or Cartesian coordinates at each position.
- The software calculates the tool center point based on these measurements.
- Verify accuracy by testing movements and adjusting if needed.
- Save the tool center point settings and apply them to the robot program.
- Perform a final test run to confirm precision.
The Role of Tool Center Point in Robot Motion Control
The tool center point plays a key role in how a robot moves and interacts with objects. It determines how the robot follows programmed paths and maintains accuracy. Without a correctly set tool center point, the robot may not align properly with objects, causing errors in tasks like assembly or packaging. Motion control systems use the tool center point to calculate how the robot’s joints should move to reach a specific location. If the tool center point is incorrect, even a small movement can cause big positioning errors. That’s why it’s important to calibrate and verify the tool center point regularly to ensure smooth motion control.
How an Incorrect Tool Center Point Can Affect Robot Performance
An incorrect tool center point can lead to serious issues in robotic operations. If the point is misaligned, the robot may place objects incorrectly, causing assembly errors. In welding, an incorrect tool center point can result in weak welds, leading to product defects. It also affects motion planning, causing unnecessary joint movements that slow down operations. This can increase wear and tear on the robot, leading to more frequent maintenance. Additionally, safety can be compromised if the robot moves unpredictably due to a wrong tool center point. Regular calibration ensures that robots perform tasks efficiently, accurately, and safely in industrial applications.
Tool Center Point in Different Industries: Welding, Packing, and More
The tool center point is essential in various industries where precision is required. In welding, the tool center point ensures that the torch reaches the exact welding location for strong and accurate welds. In the packaging industry, pick-and-place robots rely on a properly set tool center point to grip and place items correctly. In painting applications, the tool center point helps robots maintain a consistent spray pattern for even coating. Automotive manufacturing uses robots with calibrated tool center points for assembling parts with high precision. No matter the industry, a well-defined tool center point is key to improving accuracy and efficiency in robotic automation.
Advanced Tips for Maintaining Tool Center Point for Long-Term Accuracy
Regular Calibration: Periodically check and update the tool center point to maintain precision.
- Use High-Quality Sensors: Some robots support advanced calibration using laser or vision sensors for better accuracy.
- Monitor Wear and Tear: Tools can wear out over time, affecting the tool center point. Replace worn-out tools to maintain accuracy.
- Test with Different Angles: Run test movements in various orientations to confirm the tool center point remains accurate.
- Keep a Calibration Log: Maintain records of tool center point settings and updates for future reference.
- Use Software Simulations: Some robot software allows virtual testing of tool center point accuracy before applying changes to real robots.
- Avoid Manual Adjustments: Making manual changes without proper recalibration can lead to errors. Always follow a structured process.
Conclusion
The tool center point is very important for robots because it helps them move correctly and do their jobs well. If it is not set properly, robots might place things in the wrong spot, make weak welds, or even move unsafely. Taking time to define and check the tool center point makes sure robots work fast, smooth, and with high accuracy.
To keep the tool center point working well, regular calibration and testing are needed. Small mistakes can cause big problems, so it’s always good to check and fix any errors. Whether in welding, packaging, or assembly, a properly set tool center point helps robots work better and last longer.
FAQs
Q: What is a tool center point in a robot?
A: It is the exact point on a robot’s tool where work is done, like gripping, welding, or cutting.
Q: Why is a tool center point important?
A: It helps the robot move correctly and perform tasks with accuracy, avoiding errors and mistakes.
Q: How do I set the tool center point?
A: You need to measure and enter the correct position of the tool in the robot’s software using calibration steps.
Q: What happens if the tool center point is wrong?
A: The robot may pick up objects incorrectly, weld in the wrong place, or move in the wrong direction.
Q: How often should I check the tool center point?
A: It should be checked regularly, especially if the tool is changed or the robot is not working as expected.